
Building a Friendly Robotic Dog
When the unmodified Unitree Go2 Pro first arrived, it attacked a kitchen. This is what you get for putting it in “Companion mode” in close quarters without reading the manual. It was very loud and very late when the incident occurred just minutes after the unboxing. We hadn’t realized how forceful the dog could be. It can seriously injure a small child, and perhaps even an adult. In companion mode, the idea is that it will walk with you. Unfortunately, though, the Go2 does not have a LIDAR sensor on its backside, and therefore, if it backs into something and detects as much, it will do what can only be described by an unaccustomed observer as a complete meltdown and freakout.


Our goal for this R&D project with Navtrove, a new US-based robotic companionship company, was to help build a friendly robotic dog companion. Out of the box, the Go2 Pro, is more like a militant machine on four legs. It’s heavy (most of its 15kgs are concentrated at the center, feeling more like 25kgs when impact occurs); it can cause complaints from neighbors for thumping too much, and don’t accidentally make it jump towards anything… let alone pounce. We thought it would be this fragile piece of hardware that we had to set down in the right place and be careful it didn’t bump into anything less it might injure itself… it was the other way around. We are much more concerned about it injuring its surroundings.
The first few days spent with the Go2 were quite the learning curve. There is the Go2 App, where you can see what the dog sees, both from its forward-facing camera and it’s LIDAR.

Additionally, it has several autonomous and scripted modes in-app. They can be quite funny, especially given how it can walk around talking in a particularly… particular voice about how much it needs to be petted for not rummaging though garbage. It’s early technology.
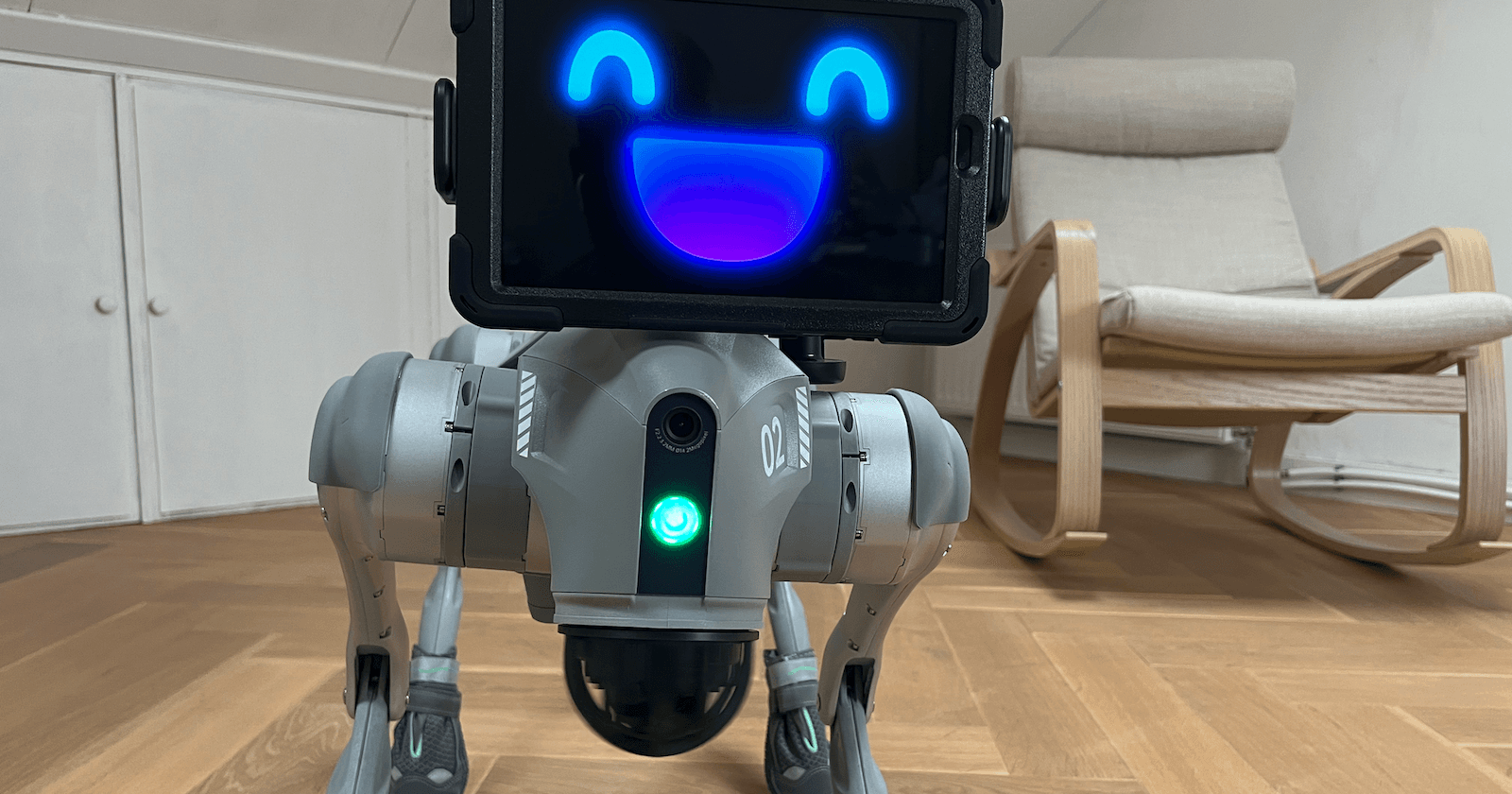
By Day 3, we’d added padded dog shoes to help with the loud thumping. It only minimized the sound by about half, but certainly an improvement. More on this soon. Additionally, we were able to attach a tablet holder via a clamping device, as well as tablet, to give the robotic dog an additional face, if you’d consider the camera area that originally comes with it a “face”. Now, that only face is more like a neck. More innovation will be occurring here.

The goal now is to integrate with the Unitree API from an Android app running on the new tablet face, allowing for a more customizable verbal experience and a friendlier visual expression from the dog, along with its ability to play videos of what its seen (think perimeter security).

The goal of this project is to take these learning and educate student engineers locally and abroad though both in-person and online content on how to customize Unitree robotic dogs toward creating more gentler, home-ready devices that can serve as real companions. We believe future workforces will certainly need this experience, along with general robotics repair capabilities, albeit we might see the humanoid brethren of these robotic dogs helping out quite a bit with that. We believe in-home robotics is very much part of our collective future, and we’re excited to be on the cutting-edge, providing training opportunities for our students who can hopefully go on to build the next-generation of domestic robotic companions.